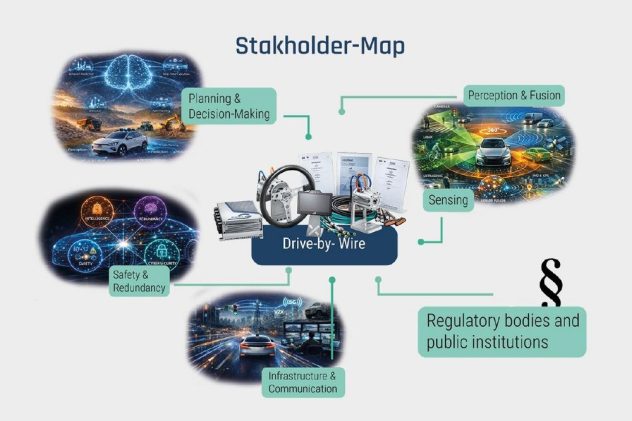
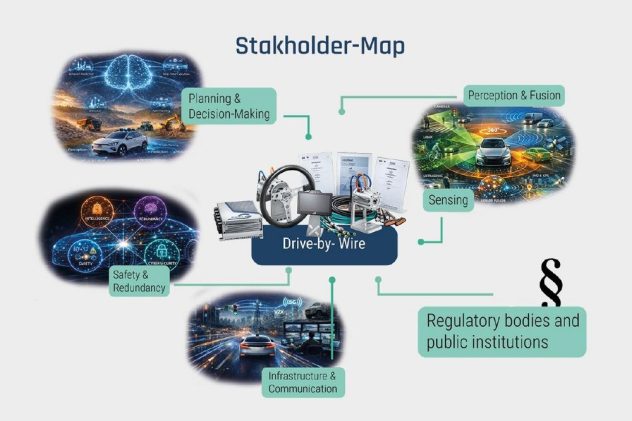
Autonomous mobility does not happen in isolation. Behind every driverless vehicle is a network of players with clearly defined roles, responsibilities, and regulatory requirements. For OEMs and Tier 1 suppliers, this means that autonomy is not a feature, but rather a system cooperation. The central question is therefore no longer: Who builds the vehicle? But […]
Read More