Navigation Without GNSS: How Next-Generation MEMS Sensors Overcome Jamming and Spoofing
Local interference is often used to intentionally prevent GNSS-enabled devices from recording and tracking positions. Such jamming devices are usually used to prevent surveillance. Although these are mostly illegal, they are fairly widespread and can pose a significant threat to the availability of GNSS, at least at the local level.
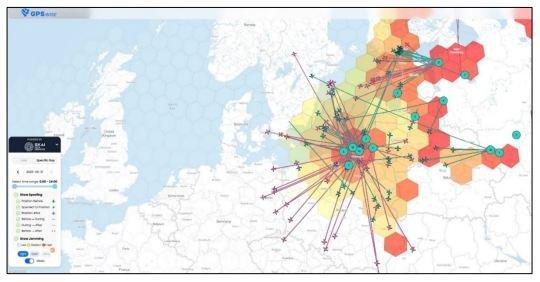
On the other hand, major events are often observed. Regional disturbances often occur in conflict zones to protect military installations or disrupt enemy operations. Traffic jams were also reported near critical infrastructure.
Spoofing is typically less common than jamming, but it poses a more worrisome integrity threat when incorrect data is used for navigation. Jamming and spoofing play an important role in the Ukraine conflict, where it is used to disrupt enemy drones, guided munitions and navigation. Such events highlight the vulnerability of GNSS-dependent systems and the need for robust mitigation techniques and strategies.
With this in mind, it is becoming increasingly important to test how GNSS devices respond to such threats, especially if they have specialized techniques to detect and mitigate interference.
The effort to make GNSS reception secure continues to increase over time due to the dynamics of developments in the software sector. Even the regular Jammer and Spoofing test events often run behind the creativity of the "attackers". What would it be nice if there were signals that cannot be changed by unauthorized access and the navigation can get rid of these Achilles‘ heels.
Alternatives to GNSS
Simple units, such as mobile devices or smart watches, use a 3-axis magnetometer to find the north. Such a sensor measures the angle between the orientation of the system and the Earth’s magnetic field. Primarily, these types of sensors measure magnetic north, which leads to an error in the adjustment. Secondly, the accuracy is greatly reduced when the sensor is surrounded by magnetic elements.
Advanced locators use a gyroscopic compass instead of a magnetometer. Gyroscopes measure angular velocity relative to its inertial position. A 2-axis gyroscope can find the north, and a 3-axis gyroscope detects the Earth’s axis of rotation. The gyroscopes measure the geographic north and are not affected by external magnetic fields or surrounding metals. When using gyroscopes, however, bias drift has an influence.
In these systems, continuous sources of error such as temperature drift, vibration, bias offset are often present and exposed to aging. For measurements over a longer period of time, an accelerometer is used as an auxiliary sensor to counteract these gyrometer errors. The accelerometer determines the value of the drift. This variation goes to a Kalman filter to recalibrate the gyroscope.
A gyroscope cannot distinguish the rotation of the system and that of the Earth. It is merged as a resulting vector. Therefore, the angular velocity of the system is calculated with the help of the accelerometer and the angular velocity is subtracted from the output of the gyroscope to correctly capture the Earth’s axis of rotation and the north direction.
Inclination sensors are also embedded in north viewfinders to determine the vertical angle between the horizon and the target. Here, the acceleration (gravity on Earth) is directly related to this angle. A new development in the field of MEMS gyroscopes is the SCH16T from Murata. Due to its exceptionally low noise level and high stability over its lifetime, this sensor opens up the possibility of raising mass-produced sensors to the navigation level.
The accelerometer reaches a remarkable level of 20μg (Fig. 2).
The SCH16T from Murata is considerably cheaper compared to FOG or RLG and is offered in a surface-mount SOIC24 package (12x13x3mm). In addition to gyroscope and accelerometer, the product has a digital SPI interface. The new "Time-stamping" function allows measured events to be assigned to a time and the SYNC function can be used to synchronize a multi-sensor system to a domain clock.
Revolutionary navigation technology
The companies Murata and Nordic Inertial have shown in a test setup that a one-hour GNSS-free city drive is feasible and at the same time a position accuracy of a few meters is maintained, even when driving through multi-storey parking garages and motorway tunnels. Neither GNSS nor a magnetic compass are needed.
The system is based on a single Murata MEMS Inertial Measurement Unit (IMU) coupled to a powerful embedded computer running a proprietary algorithm. The system provides the user with real-time positioning and absolute heading information in relation to the true geological north.
Those developments are field-proven algorithms suitable for land, air and sea applications, ensuring resilient vehicle positioning, accurate azimuth direction and dynamic alignment control.
This remarkable accuracy and stability are based on a deep understanding of the system and its dynamics, tailored to specific applications. These advanced algorithms lift mass-produced sensors close to the navigation grade.
The scalable, compact, robust and userfriendly inertial positioning has the potential to transform various business processes, just as GNSS did when it was introduced. It is worth noting that inertial navigation was the standard method before the advent of satellite positioning.
We are entering a new era of inertial navigation.
Glossary:
FOG Fibre-Optic Gyroskope
RLG Ring LASER Gyroscopes
MEMS Micro-electromechanical System
nmi/h Nautic miles per hour (1.852km/h)
Sources:
GPS World September 2025 – Markus Irsigler, Sebastian Kehl-Waas, Carsten Stöber, Jürgen Dampf, Rohde & Schwarz GmbH & Co. KG
SkAI Data services- https://gpswise.aero/
Safran Colibris SA – Application Note North finding
Navlab – Introduction to Inertial Navigation
Angst+Pfister Sensors and Power AG
Thurgauerstrasse 66
CH8050 Zürich
Telefon: +41 (44) 87735-00
Telefax: +41 (44) 87735-25
http://sensorsandpower.angst-pfister.com
![]()